CircleFinder step overview
 Previous
Previous
- Next

The CircleFinder step allows you to search for, and locate, circular shapes.
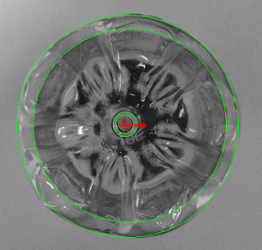
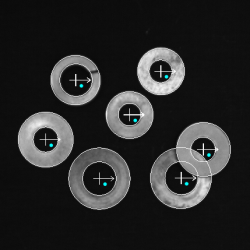
Searches are performed using edge-based geometric features. This lets you locate occurrences of circular shapes in an image despite occlusion, specular reflection, and variations in scale and contrast.
The CircleFinder step uses a specialized algorithm to locate instances of circular shapes. It has a tolerance for the deformation of circles, such that circles that have a rough contour and are not perfectly conic, or circles that are broken up, are still identified as potential occurrences.
To fine-tune the search, you can adjust the CircleFinder step settings. For example, you can limit the number of occurrences to obtain only the best ones, adjust the smoothness level to reduce image noise, or alter the detail level to find or exclude occurrences with very faint edges.
You can view all of an image's extracted target edges and resulting model edges, using the CircleFinder step annotation settings. These annotation settings are the same as those available for the ModelFinder step. See the Edge extraction settings subsection of the Search settings available for all Finder steps section in Chapter 13: ModelFinder step for more information.
The CircleFinder step provides complete support for calibration. Searches can be performed in calibrated, real-world coordinates such that, without physically correcting your images, occurrences can be found even in the presence of complex distortions, and results are calculated in real-world units when a calibration is used.
Additionally, the CircleFinder step allows you to redefine your circular shape at runtime using the Reconfigure step. See the Reconfiguring the shape definition at runtime section later in this chapter for more information.