Communication methods
 Previous
Previous
- Next

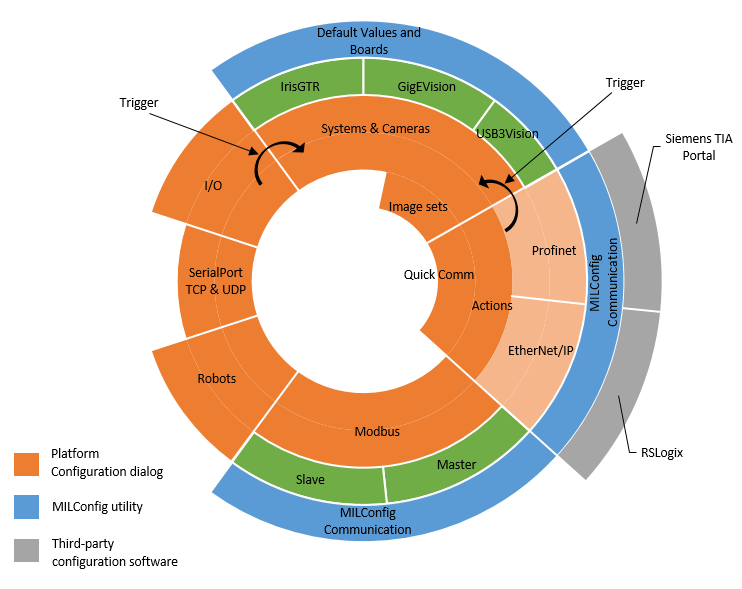
Matrox Design Assistant supports communication with PLCs using the PROFINET, EtherNet/IP, and Modbus industrial protocols. It also supports communication with industrial robot controllers and with external hardware devices via serial port connection, TCP and UDP networking protocols, or discrete I/O.
It is strongly recommended that you view the video tutorial on industrial communication, available in the Quick Start tab. Matrox Vision Academy provides further video tutorials on industrial communications, available to registered users at https://www.matrox.com/imaging/vision_academy/.
To simplify building projects using the PROFINET and EtherNet/IP industrial protocols, Matrox Design Assistant includes the Quick Comm feature. Quick Comm provides predefined datamaps, handshaking protocols, triggering, and automatic result transfers, without requiring any steps or loops to be added to the project flowchart. Note that the Quick Comm feature is not available for use with the Modbus protocol.
Depending on the type of communication, you will need to enable and configure it at various levels. Some communication types only need to be enabled/configured in Matrox Design Assistant before they can be used in a project. Others also need to be enabled/configured for the platform (using the MILConfig utility). In addition, some communication protocols require that you configure the PLC using a third-party configuration software package.
The diagram below displays an overview of the different means of communication supported by Matrox Design Assistant.
The Communications
dropdown panel, accessible using the
Communications ( ) toolbar button of the
Platform toolbar, lists the industrial protocols and other
supported means of communication. You can use this menu to enable
any of the 3 supported industrial protocols for yourproject, as
well as to enable the Quick Comm feature for the PROFINET and
EtherNet/IP protocols. You can also use the Communications dropdown panel to
set each communication type online or offline, to avoid errors if
running a project when the communication hardware is not available.
For more information, see the Going offline
subsection of the Communications
dropdown panel section later in this chapter.
) toolbar button of the
Platform toolbar, lists the industrial protocols and other
supported means of communication. You can use this menu to enable
any of the 3 supported industrial protocols for yourproject, as
well as to enable the Quick Comm feature for the PROFINET and
EtherNet/IP protocols. You can also use the Communications dropdown panel to
set each communication type online or offline, to avoid errors if
running a project when the communication hardware is not available.
For more information, see the Going offline
subsection of the Communications
dropdown panel section later in this chapter.
All communication types, except for Modbus, must be configured in their respective sections of the Platform Configuration dialog. The Platform Configuration dialog also allows you to enable or disable the Quick Comm feature for the PROFINET and EtherNet/IP protocols.
The PROFINET, EtherNet/IP, and Modbus protocol services must also be enabled in their respective pages under the Communication section of the MILConfig utility, to enable corresponding drivers and services.